
HOMAR
Quick links: GitHub repo with an extensive README (my commits are under the gks-spa username), Javadoc reference.
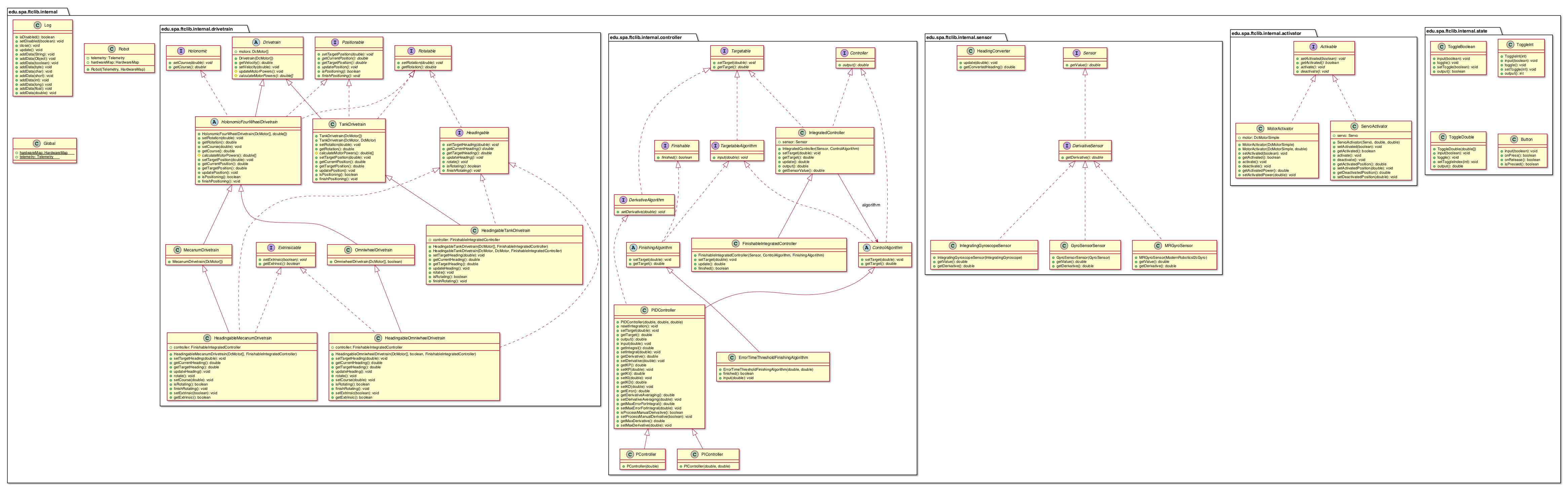
As the leader of my high school FIRST Technology Challenge robotics competition team, I noticed that we undertook a lot of repetitive coding tasks from year to year. At the same time, I was itching to take my Java skills to the next level by teaching myself more sophisticated object-oriented design. So I started and led a project to create a modular, extensible library of code to cover many common FIRST Tech Challenge tasks.
Working with my teammate Michaela, I developed an object-oriented design to unify sensors, actuators, and controls under one standard framework, implemented algorithms including a PID controller and routines to control robots with omnidirectional drivetrains, wrote over a dozen sample programs to demonstrate usage of the library, documented with comments and Javadoc, and created a set of tutorials to help other robotics teams use the library. These efforts won my team the Control Award at the 2019 Minnesota FIRST Tech Challenge State Championship.